Description:
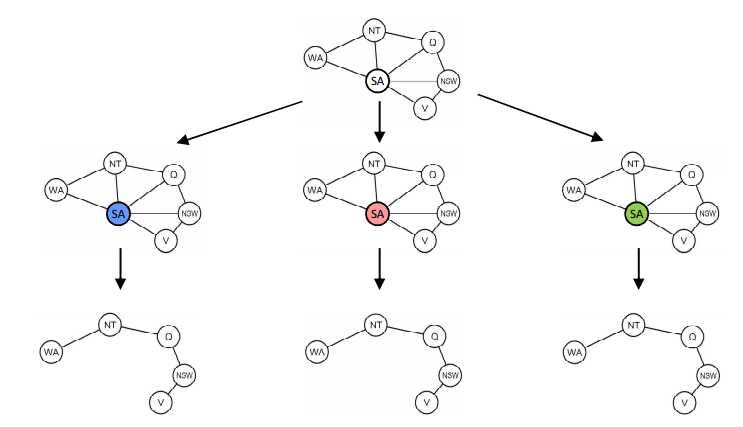
- Idea 1: One variable at a time
- Variable assignment can be commutative so no ordering, ex: A = Red, B = Blue can be switched
- Only need to consider assignments to a single variable at each step
- Idea 2: Check constraints as you go
- Only consider the assignments that doesnt conflict with all the previous assignments
- ie, “Incremental goal test”
- Therefore, each states has child states as possible assignments
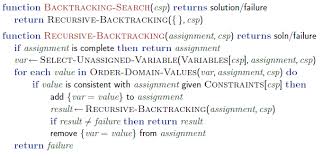
- DFS with these 2 ideas are called Backtracking Search
Filtering:
- Metareasoning
- Help detects inevitable failure early
- Forward Checking:
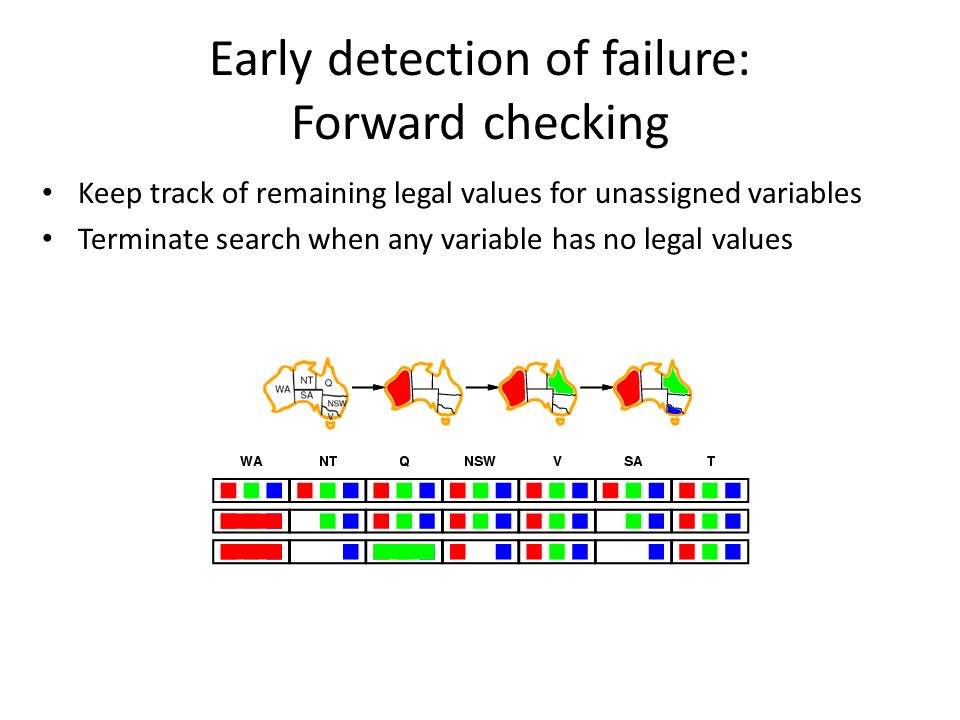
- if we assign WA to red, then NT and SA cant be red
- If we assign G to green then NT and NSW and SA cant be green
- But SA and NT cant both be blue → terminate G to green (constraint propagation)
- Propagates information from assigned to unassigned variables, but doesn’t provide early detection for all failures
- Constrant Propagation: reason from constraint to constrant
Arc Consistency:
- O(n2d3) can be reduced to O(n2d2)
- An arc X → Y is consistent iff for every value x there is some allowed value of y
- If it is violating, delete from the tail (the “from” node)
- If X loses a value, neighbors of X need to be rechecked!
- Therefore, detect failture faster than Filtering
- The Entire CSP is arc consistency if every arcs are consistent
- Can be run as a preprocessor or after each assignment
- Limitation:
- Can also have multiple solution
- Can have no solution but not knowing it
- ex: A=R/B, B=R/B, C=R/B while ABC are connected
- because they are only checked between 2 nodes at a time
K-consistency:
- 1-consistency: a node meets its own unary requirements
- 2-consistency: any 2 nodes are consistence, Arc Consistency
- 3-consistency: path consistency
- k-consistency: any k-nodes are consistence
- more k → more expensive to compute
- k-consistency also mean that k-1, k-2,k-3,… are also consistence
Ordering with new heuristics:
- Minimum Remaining Values (MRV) as a heuristic:
- Which variable should be assigned next? (MRV)
- Choose the variable with the fewest legal values left in its domain
- ”most constrained variable”
- if it gonna fail, reach failure faster
- Least Constraining Value as a heuristic:
- What order should the values be tried? (LCV)
- Determine which value has the least constraint
- pick the value with the least so there is more options for other variables
- Takes more computation
- Increase likeliness of having solution
- 1 value is less constrained than another by rerunning Filtering
Structure exploiration:
- We can exploit the structure to speed up the search
- Independent subproblems:
- if there are 2 disconnected subgraph, solve them independently can exponentially save time
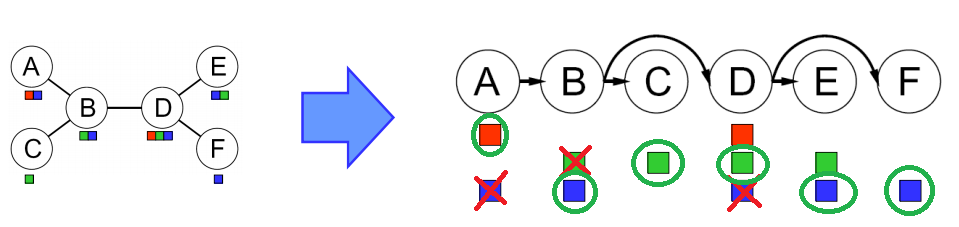
- As a tree-structured:
- theorem If the constrant graph has no loops, the CSP can be solved in O(nd2)
- Compared to general CSP, it is O(dn)
- Convert CSP to Tree Search
- Ordering by choose a root variable, order variables so that parents precede children
- Then remove backward, remove inconsistency
- ex: F makes blue of D unavailable,B’s green unavailable, then A’s blue unavailable
- Then assign forward, assign Xi consistently with Parent of Xi
- ex: A has to be red, B. has to B blue, C has to be green, D can be red or green, E is blue, F is blue
- O(nd2)
- Why does it always work?
- After backward pass. all root-to-leaf arcs are consistent
- If root-to-leaf arcs are consistent, forward assignment do not need to backtrack
- Near tree-structured:
- Conditioning: instantiate a variable, prune its neighbor domains
- Cutset conditioning: have a set of variables such that the remaining constrant graph is a tree
- Cutset size c gives runtime O(create cutset * solve tree-structured CSP)= O(dc(n−c)d2) which is very fast for small c
- Steps:
- create a set of possible nodes of cutset
- if it is blue, al its neighbor cant be blue
- Solve the rest of the nodes as tree
-
Tree decomposition: